There is no universal method of launching and recovering a vehicle. ISE's ROVs may be configured interchangeably for cage or live boating operation. In either case, a handling system will be required. In general, strategies can be divided as follows:
Cages
- Drilling support
- Science ROVs
- Telephone Maintenance ROVs
- Diving depths up to 19,685 ft. (6000 m)
Tether Management System (TMS)
The Tether Management System is used in the deployment of ROVs. The main function of the TMS is to manage a tether cabled in order to allow for the ROV to make excursions at depth for a distance up to about 200 meters from the point of the TMS position. TMS are sometimes used to de-couple the vehicle from surface motion when the vehicle is too large to be practically deployed from a cage.
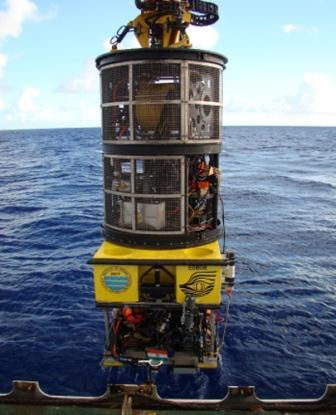
In 2011, ISE had the opportunity to provide the National Institute of Ocean Institute (NIOT), in India their TMS - see image below. To date, this TMS is the deepest deployed TMS in the world, reaching 5,289 meters in depth.
Live Boating
- Shallow water pipeline inspection ROVs
- Mine countermeasures ROVs
- Telephone cable work, even in deep water
- Science ROVs
- Pipeline Inspection

KRISO - HYSUB 25 |
Latch probes (rollover image for drawing detail) are most often used for launch and recovery when a vehicle is being live-boated, albeit pick up hooks have been used. Latch probes are designed so the vehicle is released by withdrawing dogs from the probe when the vehicle is in the water. The dogs are withdrawn with cylinders operated with compressed air. The dogs are configured so they can not be withdrawn when the vehicle weight is on them. The tether is threaded through the probe and the latch body so the tether guides the latch body to the probe. When ROV recovery is to be effected, the latch body, which is attached to a lift line, is dropped down the tether.
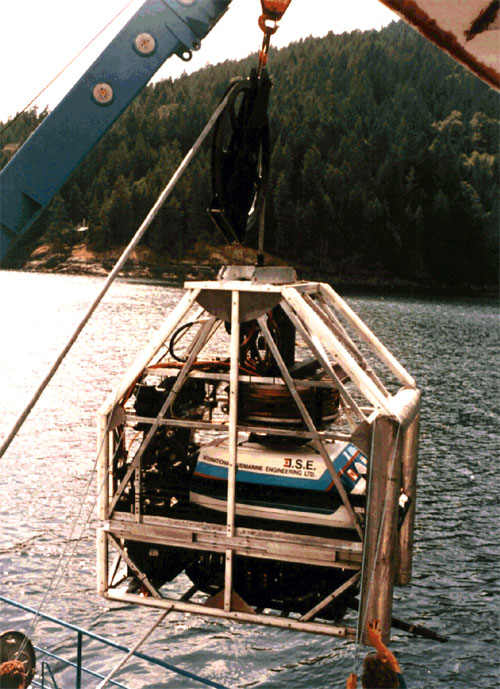
The cage provides protection for the vehicle, a means of uncoupling the ROV from surface motion and allows for the use of a light weight tether between the cage and the vehicle which enhances the ROVs maneuvering capability. The cage is most often attached to a winch on the surface by an armoured umbilical. The cage is lowered to operating depth on the umbilical and once at operating depth, the vehicle, which is latched into the cage, can be released and is able to be driven out of the cage on a lightweight tether which is most often in the range of 150 meters in length. The winding and unwinding of the tether are under tension so that a riding turn can not be put on the drum.
The cage drum is powered by an electro-hydraulic power unit. This unit also provides hydraulics to the cage camera pan & tilt.
NIOT TMS - the Deepest Deployed TMS in the world - 5,289 m |
Harbour Branch Foundation - HYSUB 50 |

SPAWAR - HYSUB 150 |
|